Time series forecasting, or time series
prediction, takes an existing series of data  and forecasts the
and forecasts the  data values. The goal is to observe or model the existing
data series to enable future unknown data values to be forecasted
accurately. Examples of data series
include financial data series (stocks, indices, rates, etc.), physically
observed data series (sunspots, weather, etc.), and mathematical data series
(Fibonacci sequence, integrals of differential equations, etc.). The phrase “time series” generically refers
to any data series, whether or not the data are dependent on a certain time
increment.
data values. The goal is to observe or model the existing
data series to enable future unknown data values to be forecasted
accurately. Examples of data series
include financial data series (stocks, indices, rates, etc.), physically
observed data series (sunspots, weather, etc.), and mathematical data series
(Fibonacci sequence, integrals of differential equations, etc.). The phrase “time series” generically refers
to any data series, whether or not the data are dependent on a certain time
increment.
Throughout the literature, many techniques have been
implemented to perform time series forecasting. This paper will focus on two techniques: neural networks and k-nearest-neighbor. This paper will attempt to fill a gap in the
abundant neural network time series forecasting literature, where testing
arbitrary neural networks on arbitrarily complex data series is common, but not
very enlightening. This paper
thoroughly analyzes the responses of specific neural network configurations to
artificial data series, where each data series has a specific
characteristic. A better understanding
of what causes the basic neural network to become an inadequate forecasting
technique will be gained. In addition,
the influence of data preprocessing will be noted. The forecasting performance of k-nearest-neighbor, which is a
much simpler forecasting technique, will be compared to the neural networks’
performance. Finally, both techniques will be used to forecast a real data
series.
Difficulties inherent in time series forecasting and
the importance of time series forecasting are presented next. Then, neural networks and k-nearest-neighbor
are detailed. Section 2 presents related work. Section 3 gives an application level description of the
test-bed application, and Section 4 presents an empirical evaluation of the results
obtained with the application.
Several difficulties can arise when performing time
series forecasting. Depending on the
type of data series, a particular difficulty may or may not exist. A first difficulty is a limited quantity
of data. With data series that are
observed, limited data may be the foremost difficulty. For example, given a company’s stock that
has been publicly traded for one year, a very limited amount of data are
available for use by the forecasting technique.
A second difficulty is noise. Two types of noisy data are (1) erroneous
data points and (2) components that obscure the underlying form of the data
series. Two examples of erroneous data
are measurement errors and a change in measurement methods or metrics. In this paper, we will not be concerned
about erroneous data points. An example
of a component that obscures the underlying form of the data series is an
additive high-frequency component. The
technique used in this paper to reduce or remove this type of noise is the
moving average. The data series  becomes
becomes  after taking a moving
average with an interval i of three.
Taking a moving average reduces the number of data points in the series
by
after taking a moving
average with an interval i of three.
Taking a moving average reduces the number of data points in the series
by  .
.
A third difficulty is nonstationarity, data
that do not have the same statistical properties (e.g., mean and variance) at
each point in time. A simple example of
a nonstationary series is the Fibonacci sequence: at every step the sequence
takes on a new, higher mean value. The
technique used in this paper to make a series stationary in the mean is
first-differencing. The data series  becomes
becomes  after taking the
first-difference. This usually makes a
data series stationary in the mean. If
not, the second-difference of the series can be taken. Taking the first-difference reduces the
number of data points in the series by one.
after taking the
first-difference. This usually makes a
data series stationary in the mean. If
not, the second-difference of the series can be taken. Taking the first-difference reduces the
number of data points in the series by one.
A fourth difficulty is forecasting technique
selection. From statistics to
artificial intelligence, there are myriad choices of techniques. One of the simplest techniques is to search
a data series for similar past events and use the matches to make a
forecast. One of the most complex
techniques is to train a model on the series and use the model to make a
forecast. K-nearest-neighbor and neural
networks are examples of the first and second techniques, respectively.
Time series forecasting has several important
applications. One application is
preventing undesirable events by forecasting the event, identifying the
circumstances preceding the event, and taking corrective action so the event
can be avoided. At the time of this
writing, the Federal Reserve Committee is actively raising interest rates to
head off a possible inflationary economic period. The Committee possibly uses time series forecasting with many
data series to forecast the inflationary period and then acts to alter the
future values of the data series.
Another application is forecasting undesirable, yet
unavoidable, events to preemptively lessen their impact. At the time of this writing, the sun’s cycle
of storms, called solar maximum, is of concern because the storms cause
technological disruptions on Earth. The
sunspots data series, which is data counting dark patches on the sun and is
related to the solar storms, shows an eleven-year cycle of solar maximum
activity, and if accurately modeled, can forecast the severity of future
activity. While solar activity is
unavoidable, its impact can be lessened with appropriate forecasting and
proactive action.
Finally, many people, primarily in the financial
markets, would like to profit from time series forecasting. Whether this is viable is most likely a
never-to-be-resolved question.
Nevertheless many products are available for financial forecasting.
A neural network is a computational model that is
loosely based on the neuron cell structure of the biological nervous
system. Given a training set of data,
the neural network can learn the data with a learning algorithm; in this
research, the most common algorithm, backpropagation, is used. Through backpropagation, the neural network
forms a mapping between inputs and desired outputs from the training set by
altering weighted connections within the network.
A brief history of neural networks follows. The origin of neural networks dates back to
the 1940s. McCulloch and Pitts (1943)
and Hebb (1949) researched networks of simple computing devices that could
model neurological activity and learning within these networks,
respectively. Later, the work of
Rosenblatt (1962) focused on computational ability in perceptrons, or
single-layer feed-forward networks.
Proofs showing that perceptrons, trained with the Perceptron Rule on
linearly separable pattern class data, could correctly separate the classes
generated excitement among researchers and practitioners.
This excitement waned with the discouraging analysis
of perceptrons presented by Minsky and Papert (1969). The analysis pointed out that perceptrons could not learn the
class of linearly inseparable functions.
It also stated that the limitations could be resolved if networks
contained more than one layer, but that no effective training algorithm for
multi-layer networks was available. Rumelhart,
Hinton, and Williams (1986) revived interest in neural networks by introducing
the generalized delta rule for learning by backpropagation, which is
today the most commonly used training algorithm for multi-layer networks.
More complex network types, alternative training
algorithms involving network growth and pruning, and an increasing number of
application areas characterize the state-of-the-art in neural networks. But no advancement beyond feed-forward neural
networks trained with backpropagation has revolutionized the field. Therefore, much work still waits.
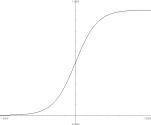
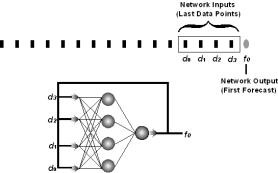
Figure
1.1 depicts an example feed-forward neural network. A neural network can have any number of layers, units per layer, network
inputs, and network outputs. This network has four units in the first
layer (layer A) and three units in the second layer (layer B), which are called
hidden layers. This network has one unit in
the third layer (layer C), which is called the output layer. Finally, this
network has four network inputs and one network output. Some texts consider the network inputs to be
an additional layer, the input layer, but since the network inputs do not
implement any of the functionality of a unit, the network inputs will not be
considered a layer in this discussion.
|
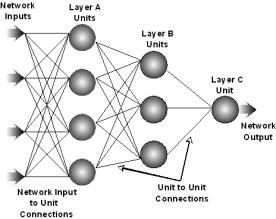
Figure 1.1 A three-layer feed-forward neural
network.
|
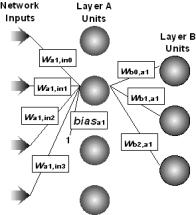
Figure 1.2 Unit with its weights and bias.
|
If a unit is in the first layer, it has the same number of
inputs as there are network inputs; if a unit is in succeeding layers, it has
the same number of inputs as the number of units in the preceding layer. Each network-input-to-unit and unit-to-unit connection (the lines in Figure 1.1)
is modified by a weight. In addition, each unit has an extra input
that is assumed to have a constant value of one. The weight that modifies this extra input is called the bias.
All data propagate along the connections in the direction from the
network inputs to the network outputs, hence the term feed-forward. Figure
1.2 shows an example unit with its weights and bias and with all other
network connections omitted for clarity.
In this section and the next, subscripts c, p,
and n will identify units in the current layer, the previous layer, and
the next layer, respectively. When the
network is run, each hidden layer unit performs the calculation in Equation 1.1 on its inputs and transfers the result (Oc)
to the next layer of units.
Equation
1.1 Activation function of a hidden layer unit.

Oc is the output of the
current hidden layer unit c, P
is either the number of units in the previous hidden layer or number of network
inputs, ic,p is an input
to unit c from either the previous hidden layer unit p or network
input p, wc,p is the
weight modifying the connection from either unit p to unit c or
from input p to unit c, and bc
is the bias.
In Equation
1.1, hHidden(x)
is the sigmoid activation function of
the unit and is charted in Figure
1.3. Other types of activation
functions exist, but the sigmoid was implemented for this research. To avoid saturating the activation function,
which makes training the network difficult, the training data must be scaled
appropriately. Similarly, before
training, the weights and biases are initialized to appropriately scaled
values.
|
Figure 1.3 Sigmoid activation function. Chart limits are x=±7 and y=-0.1, 1.1.
|
Each output layer
unit performs the calculation in Equation
1.2 on its inputs and transfers the result (Oc)
to a network output.
Equation 1.2 Activation function of an output
layer unit.

Oc is
the output of the current output layer unit c, P is the number of units in the previous hidden layer, ic,p is an input to unit c
from the previous hidden layer unit p, wc,p is the weight modifying the connection from unit p
to unit c, and bc
is the bias. For this research, hOutput(x)
is a linear activation function.
To make meaningful forecasts, the neural network has to be
trained on an appropriate data series. Examples
in the form of <input, output> pairs are
extracted from the data series, where input and output are vectors
equal in size to the number of network inputs and outputs, respectively. Then, for every example, backpropagation training
consists of three steps:
1.
Present an example’s input vector to the network
inputs and run the network: compute activation functions sequentially forward
from the first hidden layer to the output layer (referencing Figure 1.1,
from layer A to layer C).
2.
Compute the difference between the desired output for that
example, output, and the actual network output (output of unit(s) in
the output layer). Propagate the error
sequentially backward from the output layer to the first hidden layer
(referencing Figure
1.1, from layer C to layer A).
3.
For every connection, change the weight modifying that
connection in proportion to the error.
When these three steps have been performed for every example
from the data series, one epoch has
occurred. Training usually lasts
thousands of epochs, possibly until a predetermined maximum number of epochs (epochs
limit) is reached or the network output error (error limit) falls
below an acceptable threshold. Training
can be time-consuming, depending on the network size, number of examples,
epochs limit, and error limit.
Each of the three steps will now be detailed. In the first step, an input vector is
presented to the network inputs, then for each layer starting with the first
hidden layer and for each unit in that layer, compute the output of the unit’s
activation function (Equation
1.1 or Equation
1.2). Eventually,
the network will propagate values through all units to the network output(s).
In the second step, for each layer starting with the
output layer and for each unit in that layer, an error term is
computed. For each unit in the output
layer, the error term in Equation
1.3 is computed.
Equation
1.3 Error term for an output layer unit.

Dc is the
desired network output (from the output vector) corresponding to the
current output layer unit, Oc is the actual network output
corresponding to the current output layer unit, and  is the derivative of
the output unit linear activation function, i.e. 1. For each unit in the hidden layers, the error term in Equation 1.4 is computed.
is the derivative of
the output unit linear activation function, i.e. 1. For each unit in the hidden layers, the error term in Equation 1.4 is computed.
Equation
1.4 Error term for a hidden layer unit.
N is the number of
units in the next layer (either another hidden layer or the output layer), dn
is the error term for a unit in the next layer, and wn,c is
the weight modifying the connection from unit c to unit n. The
derivative of the hidden unit sigmoid activation function,  , is
, is  .
.
In the third step, for each connection, Equation 1.5, which is the change in the weight modifying that
connection, is computed and added to the weight.
Equation
1.5 Change in the weight modifying the
connection from unit p or network input p to unit c.

The weight modifying the
connection from unit p or network input p to unit c is wc,p,
a
is the learning rate (discussed later), and Op is the
output of unit p or the network input p. Therefore, after step three, most, if not
all weights will have a different value.
Changing weights after each example is presented to the network is
called on-line training. Another
option, which is not used in this research, is batch training, where
changes are accumulated and applied only after the network has seen all
examples.
The goal of backpropagation training is to converge
to a near-optimal solution based on the total squared error calculated
in Equation
1.6.
Equation
1.6 Total squared error for all units in
the output layer.
Uppercase C is the
number of units in the output layer, Dc is the desired network
output (from the output vector) corresponding to the current output
layer unit, and Oc is the actual network output corresponding
to the current output layer unit. The
constant ½ is used in the derivation of backpropagation and may or may not be
included in the total squared error calculation. Referencing Equation
1.5, the learning rate controls how quickly and how
finely the network converges to a particular solution. Values for the learning rate may range from
0.01 to 0.3.
One typical method for training a network is to
first partition the data series into three disjoint sets: the training set,
the validation set, and the test set. The network is trained (e.g., with backpropagation) directly on
the training set, its generalization ability is monitored on the
validation set, and its ability to forecast is measured on the test set. A network’s generalization ability
indirectly measures how well the network can deal with unforeseen inputs, in
other words, inputs on which it was not trained. A network that produces high forecasting error on unforeseen
inputs, but low error on training inputs, is said to have overfit the
training data. Overfitting occurs when
the network is blindly trained to a minimum in the total squared error based on
the training set. A network that has
overfit the training data is said to have poor generalization ability.
To control overfitting, the following procedure to
train the network is often used:
1. After
every n epochs, sum the total squared error for all examples from the training
set (i.e.,  where uppercase X
is the number of examples in the training set and EC is from Equation 1.6).
where uppercase X
is the number of examples in the training set and EC is from Equation 1.6).
2. Also,
sum the total squared error for all examples from the validation set. This error is the validation error.
3. Stop
training when the trend in the error from step 1 is downward and the trend in
the validation error from step 2 is upward.
When consistently the error
in step 2 increases, while the error in step 1 decreases, this indicates the
network has over-learned or overfitted the data and training should stop.
When using real-world data that is observed (instead of
artificially generated), it may be difficult or impossible to partition the
data series into three disjoint sets.
The reason for this is the data series may be limited in length and/or
may exhibit nonstationary behavior for data too far in the past (i.e., data
previous to a certain point are not representative of the current trend).
In contrast to the complexity of the neural network
forecasting technique, the simpler k-nearest-neighbor forecasting
technique is also implemented and tested.
K-nearest-neighbor is simpler because there is no model to train on the
data series. Instead, the data series
is searched for situations similar to the current one each time a forecast
needs to be made.
To make the k-nearest-neighbor process description easier,
several terms will be defined. The
final data points of the data series are the reference, and the length
of the reference is the window size.
The data series without the last data point is the shortened data
series. To forecast the data
series’ next data point, the reference is compared to the first group of data
points in the shortened data series, called a candidate, and an error is
computed. Then the reference is moved
one data point forward to the next candidate and another error is computed, and
so on. All errors are stored and
sorted. The smallest k errors
correspond to the k candidates that closest match the reference. Finally, the forecast will be the average of
the k data points that follow these candidates. Then, to forecast the next data point, the
process is repeated with the previously forecasted data point appended to the
end of the data series. This can be
iteratively repeated to forecast n data points.
|
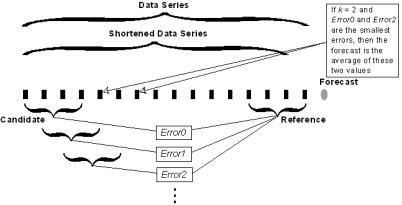
Figure 1.4
K-nearest-neighbor forecasting with window size of four and k=2.
|
Perhaps the most influential paper on this research was
Drossu and Obradovic (1996). The
authors investigate a hybrid stochastic and neural network approach to time
series forecasting, where first an appropriate autoregressive model of order p
is fitted to a data series, then a feed-forward neural network with p
inputs is trained on the series. The
advantage to this method is that the autoregressive model provides a starting
point for neural network architecture selection. In addition, several other topics pertinent to this research are
presented. The authors use real-world
data series in the evaluation, but there is one deficiency in their method:
their forecasts are compared to data that were part of the validation set, and
therefore in-sample, which does not yield an accurate error estimate. This topic is covered in more detail in
Section 3.1.1 of this paper.
Zhang and Thearling (1994) present another empirical
evaluation of time series forecasting techniques, specifically feed-forward
neural networks and memory-based reasoning, which is a form of
k-nearest-neighbor search. The authors
show the effects of varying several neural network and memory-based reasoning
parameters in the context of a real-world data set used in a time series
forecasting competition. The main
contribution of this paper is its discussion of parallel implementations of the
forecasting techniques, which dramatically increase the data processing
capabilities. Unfortunately, the
results presented in the paper are marred by typographical errors and
omissions.
Geva (1998) presents
a more complex technique of time series forecasting. The author uses the multiscale fast wavelet transform to
decompose the data series into scales, which are then fed through an array of
feed-forward neural networks. The
networks’ outputs are fed into another network, which then produces the
forecast. The wavelet transform is an
advanced, relatively new technique and is presented in some detail in the
paper. The author does a good job of
baselining the wavelet network’s favorable performance with other published
results, thereby justifying further research.
This is definitely an important future research direction. For a thorough discussion of wavelet
analysis of time series, see Torrence and Compo (1998).
Another more complex approach to time series forecasting can
be found in Lawrence, Tsoi, and Giles (1996).
The authors develop an intelligent system to forecast the direction of
change of the next value of a foreign exchange rate time series. The system preprocesses the time-series,
encodes the series with a self-organizing map, feeds the output of the map into
a recurrent neural network for training, and uses the network to make forecasts. As a secondary step, after training the
network is analyzed to extract the underlying deterministic finite state
automaton. The authors also thoroughly
discuss other issues relevant to time series forecasting.
Finally, Kingdon (1997) presents yet another complex
approach to time series forecasting—specifically financial forecasting. The author’s goal is to present and evaluate
an automated intelligent system for financial forecasting that utilizes neural
networks and genetic algorithms.
Because this is a book, extensive history, background information, and
theory is presented with the actual research, methods, and results. Both neural networks and genetic algorithms
are detailed prior to discussing the actual system. Then, a complete application of the system to an example data
series is presented.
To test various aspects of feed-forward neural network
design, training, and forecasting, as well as k-nearest-neighbor forecasting, a
test-bed Microsoft Windows application termed Forecaster
was written. Various neural network
applications are available for download on the Web, but for the purposes of
this research, an easily modifiable and upgradeable application was desired. Also, coding the various algorithms and
techniques is, in this author’s opinion, the best way to learn them. Forecaster
is written in C++ using Microsoft Visual C++ 6.0 with the Microsoft Foundation
Classes (MFC). To make the application
extensible and reusable, object-oriented analysis and design was performed
whenever applicable. A class-level
description of Forecaster is
given in Appendix A. In addition to
fulfilling the needs of this research, Forecaster
is intended to eventually be a useful tool for problems beyond time series
forecasting.
There are two types of data on which a neural network can be
trained: time series data and classification data. Examples of time series data were given in Section 1.1. In contrast,
classification data consist of n-tuples, where there are m
attributes that are the network inputs and  classifications that
are the network outputs. Forecaster
parses time series data from a single column of newline-separated values within
a text file (*.txt). Forecaster
parses classification data from multiple columns of comma-separated values
within a comma-separated-values text file (*.csv).
classifications that
are the network outputs. Forecaster
parses time series data from a single column of newline-separated values within
a text file (*.txt). Forecaster
parses classification data from multiple columns of comma-separated values
within a comma-separated-values text file (*.csv).
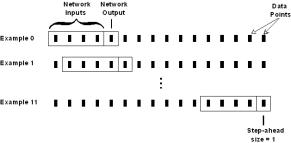
To create the examples in the form of <input,
output>
pairs referenced in Section 1.2.3,
first Forecaster parses the time
series data from the file into a one-dimensional array. Second, any preprocessing the user has
specified in the Neural Network Wizard (discussed in Section 3.1.3) is applied.
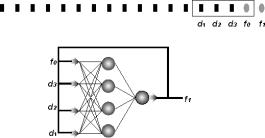
Third, as shown in Figure 3.1, a moving window is used to create the examples, in this
case for a network with four inputs and one output.
In Figure
3.1 (a), the network will be trained to forecast one step
ahead (a step-ahead size of one).
When a forecast is made, the user can specify a forecast horizon, which
is the number of data points forecasted, greater than or equal to one. In this case, a forecast horizon greater
than one is called iterative forecasting—the network forecasts one step
ahead, and then uses that forecast to forecast another step ahead, and so
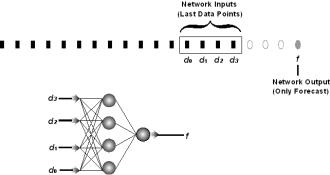
on. Figure
3.2 shows iterative forecasting. Note that the process shown in Figure 3.2 can be continued indefinitely.
In Figure
3.1 (b), the network will be trained to forecast four
steps ahead. If the network is trained
to forecast n steps ahead, where  , then when a forecast is made, the user can only make one
forecast n steps ahead. This is
called direct forecasting and is shown in Figure 3.3 for four steps ahead. Note that the number of examples is reduced by
, then when a forecast is made, the user can only make one
forecast n steps ahead. This is
called direct forecasting and is shown in Figure 3.3 for four steps ahead. Note that the number of examples is reduced by  .
.
In Figure
3.2 and Figure
3.3, the last data points, saved for forecasting to seed
the network inputs, are the last data points within either the training set or
validation set, depending on which set is “closer” to the end of the data
series. By seeding the network inputs
with the last data points, the network is making out-of-sample
forecasts. The training set and validation
set are considered in-sample, which means the network was trained on
them. The training set is clearly
in-sample. The validation set is
in-sample because the validation error determines when training is stopped (see
Section 1.2.4 for more information about validation error).
|
(a)
|

(b)
|
|
Figure 3.1 Creating examples with a moving
window for a network with four inputs and one output. In (a), the step-ahead size is 1; in (b),
the step-ahead size is 4.
|
|
(a)
|
(b)
|
|
Figure 3.2 Iteratively forecasting (a) the
first forecast and (b) the second forecast.
This figure corresponds to Figure
3.1
(a).
|
|
|
|
Figure 3.3 Directly forecasting the only
possible data point four steps ahead.
This figure corresponds to Figure
3.1 (b).
|
Neural networks can be created and modified with the Neural
Network Wizard, which is discussed in more detail in Section 3.1.3. To create a
new network, the Wizard can be accessed via the graphical user interface (GUI)
in two ways:
· on
the menu bar, select NN then New… or
· on
the toolbar, click  .
.
The Wizard prompts for a file name, which the neural
network will automatically be saved as after training. The extension given to Forecaster neural network files is .fnn.
There are three ways to open an existing Forecaster neural network file:
· on
the menu bar, select NN then Open…,
· on
the menu bar, select NN then
select the file from the most-recently-used list, or
· on
the toolbar, click  .
.
Once a network is created or opened, there are two ways to
access the Wizard to modify the network:
· on
the menu bar, select NN then Modify… or
· on
the toolbar, click  .
.
The cornerstone of the application’s GUI is the Neural
Network Wizard. The Wizard is a series
of dialogs that facilitate the design of a feed-forward neural network. Figure
3.4
(a) through (e) show the five dialogs that make up the Wizard.
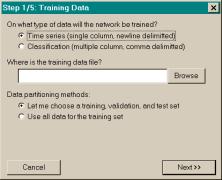
The first dialog, Training Data, enables the user to specify
on what type of data the network will be trained, where the data are located,
and how the data are to be partitioned.
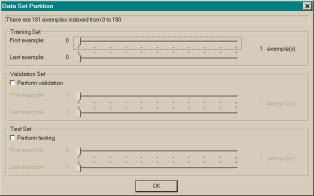
If the user selected Let me
choose… in the third field on the Training Data dialog, the Data Set
Partition dialog shown in Figure
3.4 (f) appears after the fifth dialog of the
Wizard. The Data Set Partition dialog
informs the user how many examples are in the data series. The dialog then enables the user to
partition the examples into a training set, validation set, and test set. Note that the validation set and test set
are optional.
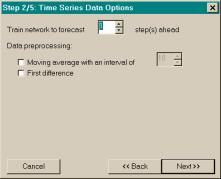
The second dialog, Time Series Data Options, enables the
user to set the example step-ahead size, perform a moving average
preprocessing, and perform a first-difference preprocessing. If the user had selected Classification… in the Training Data
dialog, the Classification Data Options dialog would have appeared instead of
the Time Series Data Options dialog.
Because classification data are not relevant to this research, the
dialog will not be shown or discussed here.
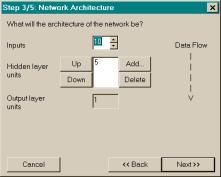
The third dialog, Network Architecture, enables the user to
construct the neural network, including specifying the number of network
inputs, the number of hidden layers and units per layer, and the number of
output layer units. For time series
data, the number of output layer units is fixed at one; for classification
data, both the number of network inputs and number of output layer units are
fixed (depending on information entered in the Classification Data Options
dialog). Selecting a suitable number of
network inputs for time series forecasting is critical and is discussed in
Section 4.2.1. Similarly,
selecting the number of hidden layers and units per layer is important and is
also discussed in Section 4.2.1.
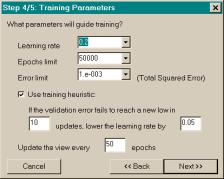
The fourth dialog, Training Parameters, enables the user to
control how the network is trained by specifying the learning rate, epochs
limit, and error limit. Also, the
dialog enables the user to set the parameters for a training heuristic
discussed in Section 4.2.2. Finally, the
dialog enables the user to adjust the frequency of training information updates
for the main application window (the “view”), which also affects the aforementioned
training heuristic. The epochs limit
parameter provides the upper bound on the number of training epochs; the error
limit parameter provides the lower bound on the total squared error given in Equation 1.6. Training
stops when the number of epochs grows to the epochs limit or the total squared
error drops to the error limit. Typical
values for the epochs limit and error limit depend on various factors,
including the network architecture and data series. Adjusting the training parameters during training is discussed in
Section 3.1.4.
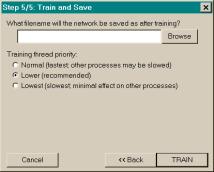
The fifth dialog, Train and Save, enables the user to
specify a file name, which the network will be saved as after training. Also, the user can change the priority of
the training thread. The training
thread performs backpropagation training and is computationally intensive. Setting the priority at Normal makes it difficult for many
computers to multi-task. Therefore, it
is recommended that the priority be set to Lower
or even Lowest for slower
computers.
(a)
|
(b)
|
|
(c)
|
(d)
|
|
(e)
|
(f)
|
|
Figure 3.4 The (a) - (e) Neural Network
Wizard dialogs and the (f) Data Set Partition dialog. The Wizard dialogs are (a) the Training
Data dialog, (b) the Time Series Data Options dialog, (c) the Network
Architecture dialog, (d) the Training Parameters dialog, and (e) the Train
and Save dialog.
|
Once the user clicks TRAIN
in the Train and Save dialog, the application begins backpropagation training
in a new thread. Every n epochs
(n is set in the Training Parameters dialog) the main window of the
application will display updated information for the current epoch number,
total squared error, unscaled error (discussed later in this section), and, if
a validation set is created in the Data Set Partition dialog, the validation
error. Also, the numbers of examples in
the training and validation sets are displayed on the status bar of the window.
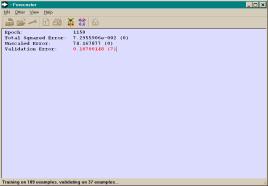
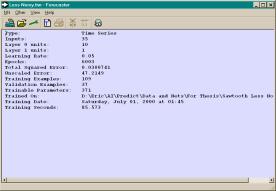
When an error metric value for the currently displayed epoch
is less than or equal to the lowest error value reported for that metric during
training, the error is displayed in black font. Otherwise, the error is displayed in red font. Figure
3.5 (a) shows a freeze-frame of the application window
during training when the validation error is increasing and (b) a freeze-frame
after training. Also notice from Figure 3.5 (a) that following each error metric, within
parentheses, is the number of view updates since the lowest error value
reported for that metric during training.
|
(a)
|
(b)
|
|
Figure 3.5 Freeze-frames of the application
window (a) during training when the validation error is increasing and (b)
after training.
|
To effectively train a neural network, the errors must be
monitored during training. Each error
value has a specific relation to the training procedure. Total squared error is given in Equation
1.6
and is a common metric for comparing how well different networks learned the
same training data set. (Note that the
value displayed in the application window does not include the ½ term in Equation 1.6.) But for
total squared error to be meaningful, the data set involved in a network
comparison must always be scaled equivalently.
For example, if data set A is scaled linearly from [0, 1] in trial 1 and
is scaled linearly from [-1, 1] in trial 2, comparing the respective total
squared errors will be comparing “apples to oranges”. Also, referencing the notation in Equation 1.6, total squared error can be misleading because,
depending on the values of Dc and Oc, the
value summed may be less than, greater than, or equal to the value of the
difference. This is the result of
taking the square of the difference.
Unscaled error allows the user to see the actual
magnitude of the training set error.
“Unscaled” means that the values used to compute the error, which are
desired output and actual output, are in the range of the data values in the
original, unscaled data series. This is
different from total squared error where the values used to compute the error
are in the scaled range usable by the neural network (e.g., [0, 1]). Unscaled error is computed in Equation 3.1.
Equation 3.1 Unscaled error for all units in the
output layer.
Uppercase C is the number of units in the output
layer, UDc is the unscaled desired network output (from the output
vector) corresponding to the current output layer unit, and UOc is
the unscaled actual network output corresponding to the current output layer
unit. To eliminate the problem caused
by the square in the total squared error, the absolute value of the difference
is used instead. An example will highlight
the unscaled error’s usefulness: if the unscaled error for an epoch is 50.0 and
there are 100 examples in the training data set, then for each example, on
average the desired output differs from the network’s actual output by  .
.
If a validation set is created in the Data Set Partition
dialog, the validation error can be used to monitor training. The validation error is perhaps the most
important error metric and will be used within the training heuristic discussed
in Section 4.2.2. Note that if
a validation set is not created, the validation error will be 0.0.
The goal of backpropagation training is to find a
near-optimal neural network weight-space solution. Local error minima on the training error curve represent
sub-optimal solutions that may or may not be the best attainable solution. Therefore, the total squared error, unscaled
error, and validation error can be observed, and when an error begins to rise
(probably after consistently dropping for thousands of epochs), the learning
rate can be increased to attempt to escape from a local minimum or decreased to
find a “finer” solution. A typical
increase or decrease is 0.05.
During training, there are two ways to access the Change
Training Parameters dialog to change the learning rate, epochs limit, and error
limit:
· on
the menu bar, select NN then Change Training Parameters… or
· on
the toolbar, click  .
.
Note that the epochs limit and error limit can be changed if
they were set too low or too high.
There are two ways to immediately stop training:
· on
the menu bar, select NN then Stop Training or
· on
the toolbar, click  .
.
After a network is trained, information about the network
will be displayed in the main application window. If desired, this information can be saved to a text file in two
ways:
· on
the menu bar, select NN then Save to Text File… or
· on
the toolbar, click  .
.
To view a simple chart of the data series on which the
network was trained, on the menu bar, select View
then Training Data Chart….
After a network is trained, a forecast can be made. Figure
3.6 shows the Time Series Forecasting dialog. The dialog can be accessed in two ways:
· on
the menu bar, select NN then Start a Forecast… or
· on
the toolbar, click  .
.
The dialog informs the user for which kind of
forecasting the network was trained, either iterative or direct. If the network was trained for iterative
forecasting, the user can specify how many steps ahead the network should iteratively
forecast. Otherwise, if the network was
trained for direct forecasting n steps ahead, the user can make only one
forecast n steps ahead. The
dialog also enables the user to enter an optional forecast output file. Finally, the forecast list box will show the
forecasts.
After a forecast is made, a simple chart of the forecast can
be viewed: on the menu bar, select View
then Forecast Data Chart…. If the user specified in the Time Series
Data Options dialog that the network should train on the first-difference of
the data series, Forecaster
automatically reconstitutes the data series, and shows the actual values in the
forecast list box, output file, and the forecast data chart—not
first-difference values. In contrast,
the first-difference values on which the network was trained are shown in the
training data chart.
|

Figure 3.6 Neural
network Time Series Forecasting dialog.
|
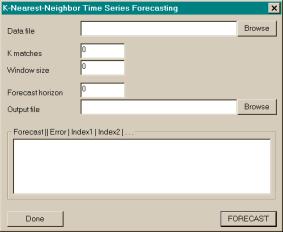
Figure
3.7 K-Nearest-Neighbor Time Series
Forecasting dialog.
|
The dialog to perform a k-nearest-neighbor forecast, shown
in Figure
3.7, can be accessed via the menu bar: select Other then K-Nearest-Neighbor….
The dialog enables the user to enter the name of the data file that will
be searched, the number of k matches, the window size, the forecast horizon,
and an optional output file. Values for
the number of k matches and window size depend on the data series to be forecast. Note that the forecast list box shows not
only the forecast, but also the average error for that forecast data point and
the zero-based indices of the k matches.
The goal of the following evaluation is to
determine the neural network’s response to various changes in the data series
given a feed-forward neural network and starting with a relatively simple
artificially generated data series. The
evaluation is intended to reveal characteristics of data series that adversely
affect neural network forecasting. Note
that the conclusions drawn may be specific to these data series and not
generally applicable. Unfortunately
this is the rule in neural networks as they are more art than science! For comparison, the simpler
k-nearest-neighbor forecasting technique will also be applied to the data
series. Finally, neural networks and
k-nearest-neighbor will be applied to forecast a real-world data series.
The base artificially generated data series
is a periodic “sawtooth” wave, shown in Figure
4.1 (a). This
data series was chosen because it is relatively simple but not trivial, has
smooth segments followed by sharp transitions, and is stationary in the
mean. Herein it will be referred to as
the “original” data series. Three
periods are shown in Figure
4.1 (a), and there are seventy-two data points per
period. The actual data point values
for a period are: 0, 1, 2, …, 9, 10, 5, 0, 1, 2, …, 19, 20, 15, 10, 5, 0, 1, 2,
…, 29, 30, 25, 20, 15, 10, 5.
By adding Gaussian (normal) random noise to
the original data series, the second data series is created, termed “less
noisy” (less noisy than the third data series), and is shown in Figure 4.1 (b). This
series was chosen because it contains a real-world difficulty in time series
forecasting: a noisy component that obscures the underlying form of the data
series. The less noisy data series has
a moderate amount of noise added, but to really obscure the original data
series, the third data series contains a significant amount of Gaussian random
noise. It is termed “more noisy” and is
shown in Figure
4.1 (c). To compare
the noise added to the less noisy and more noisy data series, histograms are
shown in Figure
4.2. The Gaussian
noise used to create the less noisy data series has a mean of zero and a
standard deviation of one; the Gaussian noise used to create the more noisy
data series has a mean of zero and a standard deviation of three. Microsoft Excel and the Random Number Generation tool under
its Tools
| Data
Analysis… menu was used to create the noisy data series.
To create the fourth data series, the linear
function  was added to the
original. It is termed “ascending” and
was chosen because it represents another real-world difficulty in time series
forecasting: nonstationarity in the mean.
The ascending data series is shown in Figure
4.1 (d).
was added to the
original. It is termed “ascending” and
was chosen because it represents another real-world difficulty in time series
forecasting: nonstationarity in the mean.
The ascending data series is shown in Figure
4.1 (d).
Finally, the real-world data series chosen
is the sunspots data series
shown in Figure
4.1 (e). It was
chosen because it is a popular series used in the forecasting literature, is
somewhat periodic, and is nearly stationary in the mean.
|
(a)
|
 (b) (b)
|
|
(c)
|
(d)
|
|
(e)
|
|
Figure 4.1 Data series used to evaluate the
neural networks and k-nearest-neighbor: (a) original, (b) less noisy, (c)
more noisy, (d) ascending, and (e) sunspots.
|
|
(a)
|
(b)
|
|
Figure 4.2 Gaussian random noise added to (a)
the less noisy data series and (b) the more noisy data series.
|
To test how
feed-forward neural networks respond to various data series, a network
architecture that could accurately learn and model the original series is
needed. An understanding of the
feed-forward neural network is necessary to specify the number of network
inputs. The trained network acts as a
function: given a set of inputs it calculates an output. The network does not have any concept of
temporal position and cannot distinguish between identical sets of inputs with
different actual outputs. For example,
referencing the original data series, if there are ten network inputs, among
the training examples (assuming the training set covers an entire period) there
are several instances where two examples have equivalent input vectors
but different output vectors.
One such instance is shown in Figure
4.3. This may
“confuse” the network during training, and fed that input vector during
forecasting, the network’s output may be somewhere in-between the output
vectors’ values or simply “way off”!
|
Figure 4.3 One instance
in the original data series where two examples have equivalent input
vectors but different output vectors.
|
Inspection of the
original data series reveals that a network with at least twenty-four inputs is
required to make unambiguous examples.
(Given twenty-three inputs, the largest ambiguous example input
vectors would be from zero-based data point 10 to 32 and from 34 to 56.) Curiously, considerably more network inputs
are required to make good forecasts, as will be seen in Section 4.4.
Next, through
trial-and-error the number of hidden layers was found to be one and the number
of units in that layer was found to be ten for the artificial data series. The number of output layer units is
necessarily one. This network, called
35:10:1 for shorthand, showed excellent forecasting performance on the original
data series, and was selected to be the reference for comparison and
evaluation. To highlight any effects of
having a too-small or too-large network for the task, two other networks,
35:2:1 and 35:20:1, respectively, are also included in the evaluation. Also, addressing the curiosity raised in the
previous paragraph, two more networks, 25:10:1 and 25:20:1, are included.
It is much more
difficult to choose the appropriate number of network inputs for the sunspots
data series. By inspecting the data
series and through trial-and-error, thirty network inputs were selected. Also through trial-and-error, one hidden
layer with thirty units was selected.
Although this network seems excessively large, it proved to be the best
neural network forecaster for the sunspots data series. Other networks that were tried include
10:10:1, 20:10:1, 30:10:1, 10:20:1, 20:20:1, and 30:20:1.
By observing neural
network training characteristics, a heuristic algorithm was developed and
implemented in Forecaster. The parameters for the heuristic are set
within the Training Parameters dialog (see Section 3.1.3). The
heuristic requires the user to set the learning rate and epochs limit to
higher-than-normal values (e.g., 0.3 and 500,000, respectively) and the error
limit to a lower-than-normal value (e.g.,  ). The heuristic also
uses three additional user-set parameters: the number of training epochs before
an application window (view) update (update frequency), the number of
updates before a learning rate change (change frequency), and a learning
rate change decrement (decrement).
Finally, the heuristic requires the data series to be partitioned into a
training set and validation set. Given
these user set parameters, the heuristic algorithm is:
). The heuristic also
uses three additional user-set parameters: the number of training epochs before
an application window (view) update (update frequency), the number of
updates before a learning rate change (change frequency), and a learning
rate change decrement (decrement).
Finally, the heuristic requires the data series to be partitioned into a
training set and validation set. Given
these user set parameters, the heuristic algorithm is:
|
for each
view-update during training
if the
validation error is higher than the lowest value seen
increment
count
if count
equals change-frequency
if the
learning rate minus decrement is greater than zero
lower the
learning rate by decrement
reset
count
continue
else
stop
training
|
The purpose of the
heuristic is to start with an aggressive learning rate, which will quickly find
a coarse solution, and then to gradually decrease the learning rate to find a
finer solution. Of course, this could
be done manually by observing the validation error and using the Change
Training Parameters dialog to alter the learning rate. But an automated solution is preferred,
especially for an empirical evaluation.
In the evaluation,
the heuristic algorithm is compared to the “simple” method of training where
training continues until either the number of epochs grows to the epochs limit
or the total squared error drops to the error limit. Networks trained with the heuristic algorithm are termed
“heuristically trained”; networks trained with the simple method are termed
“simply trained”.
Finally, the data
series in Section 4.1 are partitioned so that the training set is the first
two periods and the validation set is the third period. Note that “period” is used loosely for less
noisy, more noisy, and ascending, since they are not strictly periodic.
The coefficient
of determination from Drossu and Obradovic (1996) is used to compare the
networks’ forecasting performance and is given in Equation 4.1.
Equation 4.1 Coefficient of
determination comparison metric.
The number of
data points forecasted is n, xi is the actual value,  is the forecast
value, and
is the forecast
value, and  is the mean of the
actual data. The coefficient of
determination can have several possible values:
is the mean of the
actual data. The coefficient of
determination can have several possible values:
A coefficient
of determination close to one is preferable.
To compute the
coefficient of determination in the evaluation, the forecasts for the networks
trained on the original, less noisy, and more noisy data series are compared to
the original data series. This is
slightly unorthodox: a forecast from a network trained on one data series, for
example, more noisy, is compared to a different data series. But the justification is two-fold. First, it would not be fair to compare a
network’s forecast to data that have an added random component. This would be the case if a network was
trained and validated on the first three periods of more noisy, and then its
forecast was compared to a fourth period of more noisy. Second, the goal of the evaluation is to see
what characteristics of data series adversely affect neural network
forecasting. In other words, the goal
is determining under what circumstances a network can no longer learn the
underlying form of the data (generalize), and the underlying form is the
original data series. To compute the
coefficient of determination for the networks trained on the ascending data
series, the ascending series is simply extended. To compute the coefficient of determination for the network
trained on the sunspots data series, part of the series is withheld from
training and used for forecasting.
Table 4.1 and Table
4.2 list beginning parameters for all neural
networks trained with the heuristic algorithm and simple method,
respectively. Parameters for trained
networks (e.g., the actual number of training epochs) are presented in Section 4.4 and Section 4.5.
|
Heuristic
Algorithm Training
Update Frequency = 50, Change Frequency = 10,
Decrement = 0.05
|
|
Architecture
|
Learning Rate
|
Epochs Limit
|
Error Limit
|
Data Series
O = original
L = less noisy
M = more noisy
A = ascending
|
Training Set Data Point Range (# of Examples)
|
Validation Set Data Point Range (# of Examples)
|
|
35:20:1
|
0.3
|
500,000
|
1x10-10
|
O, L, M, A
|
0 – 143 (109)
|
144 – 215 (37)
|
|
35:10:1
|
0.3
|
500,000
|
1x10-10
|
O, L, M, A
|
0 – 143 (109)
|
144 – 215 (37)
|
|
35:2:1
|
0.3
|
500,000
|
1x10-10
|
O, L, M, A
|
0 – 143 (109)
|
144 – 215 (37)
|
|
25:20:1
|
0.3
|
250,000
|
1x10-10
|
O
|
0 – 143 (119)
|
144 – 215 (47)
|
|
25:10:1
|
0.3
|
250,000
|
1x10-10
|
O
|
0 – 143 (119)
|
144 – 215 (47)
|
Table 4.1 Beginning
parameters for heuristically trained neural networks.
|
Simple Method
Training
|
|
Architecture
|
Learning Rate
|
Epochs Limit
|
Error Limit
|
Data Series
O
= original
L
= less noisy
M
= more noisy
A = ascending
S = sunspots
|
Training Set Data Point Range (# of Examples)
|
Validation Set Data Point Range (# of Examples)
|
|
35:20:1
|
0.1
|
100,000
|
1x10-10
|
O, L, M, A
|
0 – 143 (109)
|
144 – 215 (37)
|
|
35:10:1
|
0.1
|
100,000
|
1x10-10
|
O, L, M, A
|
0 – 143 (109)
|
144 – 215 (37)
|
|
35:2:1
|
0.1
|
100,000
|
1x10-10
|
O, L, M, A
|
0 – 143 (109)
|
144 – 215 (37)
|
|
30:30:1
|
0.05
|
100,000
|
1x10-10
|
S
|
0 – 165 (136)
|
-
|
Table 4.2 Beginning
parameters for simply trained neural networks.
Often, two trained
networks with identical beginning parameters can produce drastically different
forecasts. This is because each network
is initialized with random weights and biases prior to training, and during
training, networks converge to different minima on the training error
curve. Therefore, three candidates of
each network configuration were trained.
This allows another neural network forecasting technique to be used: forecasting
by committee. In forecasting by
committee, the forecasts from the three networks are averaged together to
produce a new forecast. This may either
smooth out noisy forecasts or introduce error from a poorly performing
network. The coefficient of determination
will be calculated for the three networks’ forecasts and for the committee
forecast to determine the best candidate.
For
k-nearest-neighbor, the window size was chosen based on the discussion of choosing
neural network inputs in Section 4.2.1. For the
artificially generated series, window size values of 20, 24, and 30 with k=2
are tested. For the sunspots data
series, window size values of 10, 20, and 30 with k values of 2 and 3 were
tested, but only the best forecasting search, which has a window size of 10 and
k=3, will be shown. It is interesting
that the best forecasting window size for k-nearest-neighbor on the sunspots
data series is 10, but the best forecasting number of neural network inputs is
30. The reason for this difference is
unknown. Table 4.3 shows the various parameters for k-nearest-neighbor
searches.
|
K-Matches
|
Window Size
|
Data Series
O
= original
L
= less noisy
M
= more noisy
S = sunspots
|
Search Set Data Point Range
|
|
2
|
20
|
O, L, M
|
0 – 215
|
|
2
|
24
|
O, L, M
|
0 – 215
|
|
2
|
30
|
O, L, M
|
0 – 215
|
|
3
|
10
|
S
|
0 – 165
|
Table 4.3 Parameters
for k-nearest-neighbor searches.
Figure
4.4 graphically shows the one-period forecasting accuracy
for the best candidates for heuristically trained 35:2:1, 35:10:1, and 35:20:1
networks. Figure
4.4 (a), (b), and (c) show forecasts from networks
trained on the original, less noisy, and more noisy data series, respectively,
and the forecasts are compared to a period of the original data series. Figure
4.4 (d) shows forecasts from networks trained on the
ascending data series, and the forecasts are compared to a fourth “period” of
the ascending series. For reasons
discussed later, in Figure
4.4 (c) and (d) the 35:2:1 network is not included.
Figure
4.5 graphically shows the two-period forecasting accuracy
for the best candidates for heuristically trained (a) 35:2:1, 35:10:1, and
35:20:1 networks trained on the less noisy data series and (b) 35:10:1 and
35:20:1 networks trained on the more noisy data series.
Figure
4.6 graphically compares metrics for the best candidates
for heuristically trained 35:2:1, 35:10:1, and 35:20:1 networks. Figure
4.6 (a) and (b) compare the number of training epochs and
training time,
respectively, (c) and (d) compare the total squared error and unscaled error,
respectively, and (e) compares the coefficient of determination. The vertical axis in (a) through (d) is
logarithmic. This is indicative of a
wide range in values for each statistic.
Finally, Table
4.4 lists the raw data for the charts in Figure 4.6 and other parameters used in training. For each network configuration, the
candidate column indicates which of the three trained candidate networks, or
the committee, was chosen as the best based on the coefficient of
determination. If the committee was
chosen, the parameters and metrics for the best candidate network within the
committee are listed. Refer to Table 4.1 for more parameters.
In Figure
4.4 (a), it is clear that the 35:2:1 network is
sufficient for making forecasts up to a length of twenty-seven for the original
data series, but beyond that, its output is erratic. The forecasts for the 35:10:1 and 35:20:1 networks are near
perfect, and are indistinguishable from the original data series. The 35:10:1 and 35:20:1 networks can
accurately forecast the original data series indefinitely.
In Figure
4.4 (b), the 35:10:1 and 35:20:1 networks again forecast
very accurately, and surprisingly, the 35:2:1 network also forecasts
accurately. From Figure 4.6 (a), the 35:2:1 network trained for almost eighteen
times more epochs on the original data series than on the less noisy data
series. From Figure 4.6 (c) and (d), the 35:2:1 network trained on the less
noisy data series has two orders of magnitude higher total squared error and
one order higher unscaled error than the 35:2:1 network trained on the original
data series. (Remember that the total
squared error and unscaled error are computed during training based on the
training set.) Despite the higher
errors and shorter training time, Figure
4.6 (e) confirms what Figure
4.4 (a) and (b) show: the coefficient of determination
for the 35:2:1 network trained on the less noisy data series is significantly
better than the 35:2:1 network trained on the original data series.
Perhaps the noisy data kept the 35:2:1 network from
overfitting the data series allowing the network to learn the underlying form
without learning the noise. This makes
sense considering the heuristic algorithm: the algorithm stops training when,
despite lowering the learning rate, the validation error stops getting
lower. Since the validation error is
computed based on the validation set, which has random noise, it makes sense
that the validation error would start to rise after only a small number of
epochs. This explains the discrepancy
in the number of epochs. Therefore, it
may be expected that if the 35:2:1 network were trained on the original data series
with a similar number of epochs as when it was trained on the less noisy data
series (7,250), it too would produce good forecasts. Unfortunately, in other trials this has not shown to be the case.
In Figure
4.4 (c) and (d), the 35:2:1 network is not included
because of its poor forecasting performance on the more noisy and ascending
data series. Figure 4.6 (e) confirms this.
In Figure
4.4 (c), both the 35:10:1 and 35:20:1 networks make
decent forecasts until the third “tooth,” when the former undershoots and the
latter overshoots the original data series.
Comparing the charts in Figure
4.4 (b) and (c) to those in Figure 4.5 (a) and (b), it can be seen that near the end of the
first forecasted period many of the forecasts begin diverging or oscillating,
which is an indication that the forecast is going awry.
Taking the moving average of the noisy data series would
eliminate much of the random noise and would also smooth the sharp peaks and
valleys. It is clear from Figure 4.4 (a) that a smoother series is easier to learn (except
for the 35:2:1 network), and therefore, if the goal (as it is here) is to learn
the underlying form of the data series, it would be advantageous to train and
forecast based on the moving average of the noisy data series. But in some data series what appear to be
noise may actually be meaningful data, and smoothing this out would be
undesirable.
In Figure
4.4 (d), the 35:10:1 network does a decent job of
forecasting the upward trend, although it adds noisy oscillations. The 35:20:1 network is actually the
committee forecast, which is the average of all three 35:20:1-network
candidates. This is apparent from its
smoothing of the ascending data series.
The networks trained on the ascending data series produce long-term
forecasts that drop sharply after the first period. This could be a result of the nonstationary mean of the ascending
data series.
Taking the first-difference of the ascending data series
produces a discontinuous-appearing data series with sharp transitions because
the positive slope portions of the series have a slope of 1.1 and the negative
slope portions have a slope of –4.9. A
neural network heuristically trained on that series was able to forecast the
first-difference near perfectly. In
this case, it would be advantageous to train and forecast based on the
first-difference rather than the ascending data series (especially since Forecaster automatically reconstitutes
the forecast from its first-difference).
Finally, by evaluating the charts in Figure 4.6 and data in Table
4.4 some observations can be made:
· Networks
train longer (more epochs) on smoother data series like the original and ascending
data series.
· The
total squared error and unscaled error are higher for noisy data series.
· Neither
the number of epochs nor the errors appear to correlate well with the
coefficient of determination.
· In
most cases, the committee forecast is worse than the best candidate’s
forecast. But when the actual values
are unavailable for computing the coefficient of determination, choosing the
best candidate is difficult. In that
situation the committee forecast may be the best choice.
|
(a)
|
|
(b)
|
|
(c)
|
|
(d)
|
|
Figure 4.4 The one-period forecasting
accuracy for the best candidates for heuristically trained 35:2:1, 35:10:1,
and 35:20:1 networks trained on the (a) original, (b) less noisy, (c) more
noisy, and (d) ascending data series.
|
|
(a)
|
|
(b)
|
|
Figure 4.5 The two-period forecasting
accuracy for the best candidates for heuristically trained (a) 35:2:1,
35:10:1, and 35:20:1 networks trained on the less noisy data series and (b)
35:10:1 and 35:20:1 networks trained on the more noisy data series.
|
|
(a)
|
(b)
|
|
(c)
|
(d)
|
|
(e)
|
|
Figure 4.6 Graphical comparison of metrics
for the networks in Figure
4.4: (a) epochs, (b) training time, (c) total squared
error, (d) unscaled error, and (e) coefficient of determination. Note that the vertical axis is logarithmic
for (a) - (d). The raw data are given
in Table
4.4.
|
|
Arch.
|
Candidate
|
Data
Series
|
Ending
Learning
Rate
|
Epochs
|
Total
Squared Error
|
Unscaled
Error
|
Coeff.
of Determ. (1 period)
|
Training
Time (sec.)
|
|
35:2:1
|
c
|
Original
|
0.05
|
128850
|
0.00204144
|
8.9505
|
0.0992
|
127
|
|
35:10:1
|
c
|
Original
|
0.05
|
68095
|
1.30405e-007
|
0.0912957
|
1.0000
|
193
|
|
35:20:1
|
a
|
Original
|
0.05
|
134524
|
4.62985e-008
|
0.0521306
|
1.0000
|
694
|
|
35:2:1
|
c
|
Less Noisy
|
0.05
|
7250
|
0.118615
|
90.3448
|
0.8841
|
7
|
|
35:10:1
|
c
|
Less Noisy
|
0.05
|
3346
|
0.0271639
|
44.9237
|
0.9724
|
10
|
|
35:20:1
|
b
|
Less Noisy
|
0.05
|
3324
|
0.0346314
|
51.1032
|
0.9226
|
18
|
|
35:2:1
|
c
|
More Noisy
|
0.05
|
20850
|
0.429334
|
223.073
|
-5.7331
|
20
|
|
35:10:1
|
c
|
More Noisy
|
0.05
|
3895
|
0.0788805
|
101.869
|
0.2931
|
11
|
|
35:20:1
|
c
|
More Noisy
|
0.05
|
15624
|
0.00443201
|
24.0384
|
0.0674
|
81
|
|
35:2:1
|
a
|
Ascending
|
0.05
|
7250
|
0.0553364
|
90.7434
|
-2.4076
|
7
|
|
35:10:1
|
a
|
Ascending
|
0.05
|
60345
|
0.00145223
|
15.8449
|
0.4851
|
171
|
|
35:20:1
|
committee (b)
|
Ascending
|
0.05
|
32224
|
0.00238561
|
20.9055
|
0.4430
|
171
|
Table 4.4 Parameters and metrics for the
networks in Figure
4.4.
Figure
4.7 graphically shows the one-period forecasting accuracy
for the best candidates for simply trained 35:2:1, 35:10:1, and 35:20:1
networks. Figure 4.7 (a), (b), and (c) show forecasts from networks
trained on the original, less noisy, and more noisy data series, respectively,
and the forecasts are compared to a period of the original data series. Figure
4.7 (d) shows forecasts from networks trained on the
ascending data series, and the forecasts are compared to a fourth “period” of
the ascending series. In Figure 4.7 (c) the 35:2:1 network is not included.
Figure
4.8 graphically compares metrics for the best candidates
for simply trained 35:2:1, 35:10:1, and 35:20:1 networks. Figure
4.8 (a) and (b) compare the total squared error and
unscaled error, respectively, and (c) compares the coefficient of
determination. The vertical axis in (a)
and (b) is logarithmic. The number of
epochs and training time are not included in Figure
4.8 because all networks were trained to 100,000 epochs.
Finally, Table
4.5 lists the raw data for the charts in Figure 4.8 and other parameters used in training. Refer to Table
4.2 for more parameters.
In Figure
4.7 (a) the 35:2:1 network forecast is much better than
in Figure
4.4 (a). In this
case, it seems the heuristic was inappropriate. Notice that the heuristic allowed the 35:2:1 network to train for
28,850 epochs more than the simple method.
Also, the total squared error and unscaled error for the heuristically
trained network were lower, but so was the coefficient of determination—it was
much lower. Again, the forecasts for
the 35:10:1 and 35:20:1 networks are near perfect, and are indistinguishable
from the original data series.
In Figure
4.7 (b) the 35:2:1 network forecast is worse than in Figure 4.4 (b), whereas the 35:10:1 and 35:20:1 forecasts are
about the same as before. Notice that
the 35:10:1 forecast is from the committee, but does not appear to smooth the
data series’ sharp transitions.
In Figure
4.7 (c), the 35:2:1 network is not included because of
its poor forecasting performance on the more noisy data series. The 35:10:1 and 35:20:1 forecasts are
slightly worse than before.
In Figure
4.7 (d), the 35:2:1 network is included and its
coefficient of determination is much improved from before. The 35:10:1 and 35:20:1 network forecasts
are decent, despite the low coefficient of determination for 35:10:1. The forecasts appear to be shifted up when
compared to those in Figure
4.4 (d).
Finally, by evaluating the charts in Figure 4.8 and data in Table
4.5 some observations can be made:
· The
total squared error and unscaled error are higher for noisy data series with
the exception of the 35:10:1 network trained on the more noisy data
series. It trained to extremely low
errors, orders of magnitude lower than with the heuristic, but its coefficient
of determination is also lower. This is
probably an indication of overfitting the more noisy data series with simple
training, which hurt its forecasting performance.
· The
errors do not appear to correlate well with the coefficient of determination.
· In
most cases, the committee forecast is worse than the best candidate’s forecast.
· There
are four networks whose coefficient of determination is negative, compared with
two for the heuristic training method.
|
(a)
|
|
(b)
|
|
(c)
|
|
(d)
|
|
Figure 4.7 The one-period forecasting
accuracy for the best candidates for simply trained 35:2:1, 35:10:1, and
35:20:1 networks trained on the (a) original, (b) less noisy, (c) more noisy,
and (d) ascending data series.
|
|
(a)
|
(b)
|
|
(c)
|
|
Figure 4.8 Graphical comparison of metrics
for the networks in Figure
4.7: (a) total squared error, (b) unscaled error, and
(c) coefficient of determination.
Note that the vertical axis is logarithmic for (a) and (b). The raw data are given in Table 4.5.
|
|
Arch.
|
Candidate
|
Data
Series
|
Ending
Learning
Rate
|
Epochs
|
Total
Squared Error
|
Unscaled
Error
|
Coeff.
of Determ. (1 period)
|
Training
Time (sec.)
|
|
35:2:1
|
b
|
Original
|
0.1
|
100000
|
0.0035864
|
14.6705
|
0.9111
|
99
|
|
35:10:1
|
c
|
Original
|
0.1
|
100000
|
3.02316e-006
|
0.386773
|
1.0000
|
286
|
|
35:20:1
|
a
|
Original
|
0.1
|
100000
|
2.15442e-006
|
0.376312
|
1.0000
|
515
|
|
35:2:1
|
b
|
Less Noisy
|
0.1
|
100000
|
0.0822801
|
84.8237
|
0.5201
|
99
|
|
35:10:1
|
committee (b)
|
Less Noisy
|
0.1
|
100000
|
0.00341762
|
17.6535
|
0.9173
|
287
|
|
35:20:1
|
b
|
Less Noisy
|
0.1
|
100000
|
0.00128001
|
10.8401
|
0.9453
|
531
|
|
35:2:1
|
b
|
More Noisy
|
0.1
|
100000
|
0.360209
|
203.893
|
-4.6748
|
100
|
|
35:10:1
|
a
|
More Noisy
|
0.1
|
100000
|
2.47609e-009
|
0.0166514
|
-0.0056
|
282
|
|
35:20:1
|
c
|
More Noisy
|
0.1
|
100000
|
0.000106478
|
3.65673
|
-1.5032
|
519
|
|
35:2:1
|
a
|
Ascending
|
0.1
|
100000
|
0.023301
|
59.7174
|
0.4091
|
98
|
|
35:10:1
|
a
|
Ascending
|
0.1
|
100000
|
0.000421792
|
8.67945
|
-0.3585
|
280
|
|
35:20:1
|
b
|
Ascending
|
0.1
|
100000
|
0.000191954
|
5.87395
|
0.4154
|
529
|
Table 4.5 Parameters and metrics for the
networks in Figure
4.7.
Networks with twenty-five inputs were also tested. According to the analysis presented in
Section 4.2.1, twenty-five inputs should be a sufficient number to
eliminate any ambiguous examples. Figure 4.9 graphically shows the one-period forecasting accuracy
for the best candidates for heuristically trained 25:10:1 and 25:20:1 networks
trained on the original data series. Table 4.6 lists the raw data for the parameters and
metrics. Refer to Table 4.1 for more parameters.
|
|
|
Figure 4.9 The one-period forecasting
accuracy for the best candidates for heuristically trained 25:10:1 and
25:20:1 networks trained on the original data series.
|
|
Arch.
|
Candidate
|
Data
Series
|
Ending
Learning
Rate
|
Epochs
|
Total
Squared Error
|
Unscaled
Error
|
Coeff.
of Determ. (1 period)
|
Training
Time (sec.)
|
|
25:10:1
|
committee (b)
|
Original
|
0.15
|
250000
|
0.0002548
|
1.87352
|
-25.4708
|
651
|
|
25:20:1
|
committee (a)
|
Original
|
0.15
|
250000
|
9.68947e-005
|
1.0859
|
-30.4758
|
1150
|
Table 4.6 Parameters and metrics for the
networks in Figure
4.9.
Figure
4.10 graphically shows the one-period forecasting accuracy
for k-nearest-neighbor searches with k=2 and window sizes of 20, 24, and 30. Figure
4.10 (a), (b), and (c) show forecasts from searches on the
original, less noisy, and more noisy data series, respectively, and the
forecasts are compared to a period of the original data series. Table
4.7 lists the parameters and coefficient of determination
for the searches in Figure
4.10. Refer to Table 4.3 for more parameters.
In Figure
4.10 (a), as expected from Section 4.3, the search with window size of 20 cannot accurately
forecast the entire period. The
searches with window sizes of 24 and 30 forecast the period exactly. This also is expected because there are
always candidates in the search set that unambiguously match the reference.
In Figure
4.10 (b), the search with window size of 20 does
significantly better than it did in (a).
In fact, all three searches forecasted the exact same values. But in (c) the search with window size of 20
again cannot accurately forecast the entire period. The level of noise may be the reason for this behavior: a small
amount of noise reduces the size of the window necessary to be unambiguous, but
more noise increases the size.
The forecasting accuracy of the k-nearest-neighbor searches
with window sizes of 24 and 30 on the less noisy and more noisy data series is
surprising. Comparing the coefficients
of determination for the heuristically trained and simply trained neural
networks to those of the much simpler k-nearest-neighbor searches
reveals that the latter time-series forecasting technique, on the artificial
data sets, is superior.
Note that the k-nearest-neighbor forecasting technique is
not suitable for series that are not stationary in the mean, such as the
ascending data series. This is because
the technique can never forecast a value greater than the values in its search
set. Therefore, it cannot forecast
ascending values. But if the
first-difference of a nonstationary series is taken, the k-nearest-neighbor
technique can then forecast based on the first-difference values.
|
(a)
|
|
(b)
|
|
(c)
|
|
Figure 4.10 The one-period forecasting
accuracy for k-nearest-neighbor searches with k=2 and window sizes of 20, 24,
and 30 on the (a) original, (b) less noisy, and (c) more noisy data series.
|
|
K-Matches
|
Window
Size
|
Data
Series
|
Coeff.
of Determ. (1 period)
|
|
2
|
20
|
Original
|
-0.0427
|
|
2
|
24
|
Original
|
1.0000
|
|
2
|
30
|
Original
|
1.0000
|
|
2
|
20
|
Less Noisy
|
0.9925
|
|
2
|
24
|
Less Noisy
|
0.9925
|
|
2
|
30
|
Less Noisy
|
0.9925
|
|
2
|
20
|
More Noisy
|
-0.0432
|
|
2
|
24
|
More Noisy
|
0.9489
|
|
2
|
30
|
More Noisy
|
0.9343
|
Table 4.7 Parameters and coefficient of
determination for the k-nearest-neighbor searches in Figure 4.10.
|
|
|
Figure 4.11 Thirty-four year forecasting
accuracy for the best candidate simply trained 30:30:1 neural network and
k-nearest-neighbor search with k=3 and window size of 10.
|
|
Arch.
|
Candidate
|
Data
Series
|
Ending
Learning
Rate
|
Epochs
|
Total
Squared Error
|
Unscaled
Error
|
Coeff.
of Determ.
|
Training
Time (sec.)
|
|
30:30:1
|
committee (c)
|
Sunspots
|
0.05
|
100000
|
5.10651e-005
|
9.1138
|
-0.5027
|
845
|
Table 4.8 Parameters and metrics for the
neural network in Figure
4.11.
|
K-Matches
|
Window
Size
|
Data
Series
|
Coeff.
of Determ.
|
|
3
|
10
|
Sunspots
|
0.2847
|
Table 4.9 Parameters and coefficient of
determination for the k-nearest-neighbor search in Figure 4.11.
Section 1 introduced time series forecasting, described the
work presented in the typical neural network paper, which justified this paper,
and identified several difficulties associated with time series
forecasting. Among these difficulties,
noisy and nonstationary data were investigated further in this paper. Section 1 also presented feed-forward neural networks and
backpropagation training, which was used as the primary time series forecasting
technique in this paper. Finally,
k-nearest-neighbor was presented as an alternative forecasting technique.
Section 2 briefly discussed previous time series forecasting
papers. The most notable of these being
the paper by Drossu and Obradovic (1996), who presented compelling research
combining stochastic techniques and neural networks. Also of interest were the paper by Geva (1998) and the book by
Kingdon (1997), which took significantly more sophisticated approaches to time
series forecasting.
Section 3 presented Forecaster
and went through several important aspects of its design, including parsing
data files, using the Wizard to create networks, training networks, and
forecasting using neural networks and k-nearest-neighbor.
Section 4 presented the crux of the paper. First, the data series used in the
evaluation were described, and then parameters and procedures used in
forecasting were given. Among these was
a method for selecting the number of neural network inputs based on data series
characteristics (also applicable to selecting the window size for
k-nearest-neighbor), a training heuristic, and a metric for making quantitative
forecast comparisons. Finally, a
variety of charts and tables, accompanied by many empirical observations, were
presented for networks trained heuristically and simply and for
k-nearest-neighbor.
From these empirical observations several
conclusions can be drawn. First, in
some cases the heuristic worked better than the simple method and quickly
trained a neural network to generalize the underlying form of the data series,
without overfitting. In other cases,
such as with the 35:2:1 network trained on the original data series, the simple
training method produced better results.
Unfortunately, one training method does not appear to be clearly better
than the other. Second, it appears from
the training time and/or error that it is difficult or impossible to determine
the network’s forecasting ability. The
only way to determine forecasting ability is to make a forecast, compare it to
known values, and compute the coefficient of determination. Third, the committee method of forecasting
proved better in only a couple of cases.
Finally, and most surprisingly, the k-nearest-neighbor forecasting accuracy
was consistently better than the neural networks’ forecasting accuracy for the
data series tested!
One goal of the research was to determine the
performance of various neural network architectures in forecasting various data
series. The empirical evaluation showed
that increasingly noisy data series increasingly degrade the ability of the
neural network to learn the underlying form of the data series and produce good
forecasts. Depending on the nature of
the data series, taking the moving average may or may not be appropriate to
smooth the fluctuations.
Nonstationarity in the mean also degraded the network’s forecasting
performance. However, training on the
first-difference produced better results.
Further, a network with too few hidden units, such as 35:2:1, forecasts
well on simpler data series, but fails for more complex ones. In contrast, a network with an excessive
number of hidden units, such as 35:20:1, appears to do as well as a network
with a “sufficient” number of hidden units, such as 35:10:1. Finally, the networks with twenty-five
inputs, which should be a sufficient number of inputs, proved to be poor
choices for learning even the original data series. All of the above observations add up to one thing: feed-forward
neural networks are extremely sensitive to architecture and parameter choices,
and making such choices is currently more art than science, more
trial-and-error than absolute, more practice than theory.
The field of neural networks is very diverse and
opportunities for future research exist in many aspects, including data
preprocessing and representation, architecture selection, and application. The future of neural network time series
forecasting seems to be in more complex network types that merge other
technologies with neural networks, such as wavelet networks. Nevertheless, a theoretic foundation on
which to build is absolutely necessary, as more complex networks still suffer
from basic problems such as data preprocessing, architecture selection, and
parameterization.
Drossu, R., & Obradovic, Z. (1996). Rapid Design of Neural Networks for Time
Series Prediction. IEEE
Computational Science & Engineering, Summer 1996, 78-89.
Geva, A. (1998).
ScaleNet—Multiscale Neural-Network Architecture for Time Series
Prediction. IEEE Transactions on
Neural Networks, 9(5), 1471-1482.
Gonzalez, R. C. & Woods, R. E. (1993). Digital Image Processing. New York: Addison-Wesley.
Hebb, D. O. (1949). The
Organization of Behavior: A Neuropsychological Theory. New York: Wiley & Sons.
Kingdon, J. (1997). Intelligent
Systems and Financial Forecasting.
New York: Springer-Verlag.
Lawrence, S., Tsoi, A. C., & Giles, C. L. (1996). Noisy Time Series Prediction Using Symbolic
Representation and Recurrent Neural Network Grammatical Inference
[Online]. Available: http://www.neci.nj.nec.com/homepages/lawrence/papers/finance-tr96/latex.html
[March 27, 2000].
McCulloch, W. S., & Pitts, W. H. (1943). A Logical Calculus of the Ideas Imminent in
Nervous Activity. Bulletin of
Mathematical Biophysics, 5, 115-133.
Minsky, M., & Papert, S. (1969). Perceptrons: An Introduction to
Computational Geometry. Cambridge,
MA: MIT Press.
Rosenblatt, F. (1962).
Principles of Neurodynamics: Perceptrons and the Theory of Brain
Mechanisms. Washington, D. C.:
Spartan.
Rumelhart, D. E., Hinton, G. E., & Williams, R. J.
(1986). Learning Internal
Representations by Error Propagation.
In D. E. Rumelhart, et al. (Eds.), Parallel Distributed Processing:
Explorations in the Microstructures of Cognition, 1: Foundations,
318-362. Cambridge, MA: MIT Press.
Torrence, C., & Compo, G. P. (1998). A Practical Guide to Wavelet Analysis
[Online]. Bulletin of the American
Meteorological Society. Available: http://paos.colorado.edu/research/wavelets/
[July 2, 2000].
Zhang, X., & Thearling, K. (1994). Non-Linear Time-Series Prediction by
Systematic Data Exploration on a Massively Parallel Computer [Online]. Available: http://www3.shore.net/~kht/text/sfitr/sfitr.htm
[March 27, 2000].
Appendix A: Class-level description
of Forecaster
|
MFC-Based Classes
|
|
CPredictApp
|
Windows application
instantiation and initialization
|
|
CMainFrame
|
Frame window management
|
|
CPredictDoc
|
Reads, writes, and
maintains all application-specific data
|
|
CPredictView
|
Displays
application-specific data
|
|
Dialog Classes
|
|
TrainingDataDlg
|
Dialog 1 of the Wizard
|
|
TSDataOptionsDlg
|
Dialog 2 of the Wizard for
time series networks
|
|
ClDataOptionsDlg
|
Dialog 2 of the Wizard for
classification networks
|
|
ArchitectureDlg
|
Dialog 3 of the Wizard
|
|
TrainingParamsDlg
|
Dialog 4 of the Wizard
|
|
TrainAndSaveDlg
|
Dialog 5 of the Wizard
|
|
DataSetPartitionDlg
|
Allows the user to
partition the data series
|
|
AddHiddenLayerDlg
|
Supplements the
Architecture dialog
|
|
ChangeParamsDlg
|
Allows the user to change
the training parameters during training
|
|
TSPredictDlg
|
Allows the user to make a
neural network forecast
|
|
ChartDlg
|
Displays the training or
forecast data chart
|
|
KNearestNeighborDlg
|
Allows the user to make a
k-nearest-neighbor forecast
|
|
CAboutDlg
|
Displays information about
Forecaster
|
|
WhatIsDlg
|
Displays description of
neural networks (unused)
|
|
Miscellaneous Classes
|
|
NeuralNet
|
Neural network
implementation
|
|
TSNeuralNet
|
Subclass of NeuralNet for
time series networks
|
|
Unit
|
Neural network unit implementation
|
|
Data
|
Contains training data
|
|
Chart
|
Basic chart implementation
|
|
DataChart
|
Subclass of Chart for
training or forecast data charts
|
|
Histogram
|
Subclass of Chart for
histogram charts (unused)
|
|
KNearestNeighbor
|
K-nearest-neighbor
implementation
|